
Беспутевой ковочный манипулятор
Беспутевой ковочный манипулятор – это, на первый взгляд, просто инструмент для перемещения слитков. Но на деле, это целая система, требующая глубокого понимания процессов, которые происходят на металлургическом предприятии. Часто слышу от заказчиков: 'Нам нужен робот, который будет просто перемещать слитки из точки А в точку Б'. Да, это часть работы, но если не учитывать особенности производственной линии, конструктивные нюансы манипулятора и специфику обрабатываемого металла, то даже самый дорогой робот окажется бесполезным. Поэтому, в этой статье постараюсь поделиться своим опытом, от практических кейсов до ошибок, которые, к сожалению, часто встречаются.
Откуда взялось название? И что оно значит на практике
Название 'беспутевой' – это, наверное, самое точное описание функционала. В отличие от традиционных конвейерных систем, беспутевой ковочный манипулятор не требует жестко заданного маршрута. Он способен произвольно перемещаться по цеху, принимая решения о маршруте в реальном времени, опираясь на данные от датчиков и системы управления. Это обеспечивает гибкость и адаптивность к различным производственным сценариям, что особенно важно при работе с нестандартными размерами и формами слитков. Например, если требуется переместить крупный слиток между двумя станками, расположенными в разных частях цеха, а прокладка жесткого конвейера невозможна или экономически нецелесообразна, то именно беспутевой ковочный манипулятор и становится оптимальным решением.
Но здесь есть и свои сложности. Реализация беспутевой навигации требует серьезной инженерной работы, включая разработку алгоритмов планирования маршрута, разработку системы датчиков и координации движения манипулятора. Важно учитывать не только физические ограничения цеха (наличие препятствий, проходы), но и особенности работы других станков и оборудования. Иначе возможны столкновения и просто паралич всей производственной линии. Мы сталкивались с ситуацией, когда манипулятор, настроенный на оптимизацию маршрута, внезапно 'застрявал' в узком проходе, прерывая всю работу цеха. Пришлось перепрограммировать систему и добавить 'запасные' маршруты.
Системы позиционирования и навигации
Существует несколько подходов к позиционированию и навигации беспутевых ковочных манипуляторов. Самый распространенный – это использование лазерных сканеров и системы визуального отслеживания. Манипулятор сканирует окружающее пространство, создавая трехмерную карту цеха, и планирует маршрут, избегая препятствий. Более современные системы используют гироскопы, акселерометры и GPS (если это возможно в условиях цеха) для более точной навигации. Но выбор системы зависит от многих факторов, включая точность позиционирования, скорость работы и стоимость. Мы применяли различные системы, и выбор всегда делается после тщательного анализа конкретных требований заказчика. Важно понимать, что стоимость системы позиционирования существенно влияет на общую стоимость беспутевого ковочного манипулятора, поэтому не стоит экономить на этом компоненте.
Например, недавно мы работали с предприятием, где необходимо было перемещать тяжелые слитки по сложному маршруту с множеством препятствий. В этом случае, использование лазерного сканера оказалось наиболее эффективным решением, обеспечив высокую точность позиционирования и возможность обхода любых препятствий. Но, с другой стороны, стоимость такой системы значительно превышала стоимость более простых решений. Поэтому, при выборе системы позиционирования необходимо учитывать не только технические характеристики, но и экономическую целесообразность. В конечном итоге, решение должно быть оптимальным с точки зрения соотношения цена/качество.
Проблемы совместимости и интеграции
Еще одна важная проблема – это совместимость беспутевого ковочного манипулятора с существующим оборудованием и системами автоматизации цеха. Манипулятор должен быть способен взаимодействовать с другими станками, системами управления производством (MES) и системами учета материалов (ERP). Если интеграция не выполнена правильно, могут возникнуть проблемы с передачей данных, что приведет к сбоям в работе всей производственной линии. При интеграции особенно важно учитывать протоколы связи и формат данных, используемые различными системами. Мы часто сталкиваемся с ситуацией, когда из-за несовместимости протоколов приходится разрабатывать специальные адаптеры и интерфейсы. Это требует дополнительных затрат времени и ресурсов, но без этого невозможно обеспечить бесперебойную работу цеха. На сайте ООО Цзянсу Лунъянь Машинери [https://www.lyjx.ru](https://www.lyjx.ru) можно найти информацию о совместимости наших решений с различными промышленными системами.
Ранее мы проектировали систему перемещения слитков для нового металлургического завода. Заказчики ожидали, что манипулятор будет автоматически подбирать слитки для конкретного станка, исходя из информации, поступающей из ERP системы. Однако, выяснилось, что формат данных, используемый ERP системой, несовместим с протоколом связи манипулятора. Пришлось разрабатывать специальный модуль, который преобразовывал данные из ERP системы в формат, понятный манипулятору. Этот процесс занял несколько месяцев и потребовал значительных усилий, но в итоге мы смогли обеспечить полную интеграцию системы. Это показывает, насколько важно учитывать совместимость оборудования и систем при планировании внедрения беспутевого ковочного манипулятора.
Автоматизация подбора слитков
Автоматизация подбора слитков – это важная функция, которая позволяет повысить эффективность работы цеха и снизить трудозатраты. Манипулятор с системой машинного зрения может распознавать различные типы слитков (по размеру, форме, маркировке) и подбирать их для конкретных станков. Это позволяет исключить ошибки при ручном подборе слитков и сократить время, необходимое для подготовки к производству. Система машинного зрения может также контролировать состояние слитков (наличие дефектов, повреждений) и сообщать об этом оператору. Это позволяет предотвратить использование бракованных слитков и повысить качество продукции. В ООО Цзянсу Лунъянь Машинери мы предлагаем решения, основанные на передовых технологиях машинного зрения, которые обеспечивают высокую точность и надежность подбора слитков.
Одна из проблем, с которыми мы сталкивались при автоматизации подбора слитков, – это сложность распознавания слитков с нечеткой маркировкой или повреждениями. В таких случаях, система машинного зрения может давать ошибочные результаты. Для решения этой проблемы мы используем алгоритмы обработки изображений, которые позволяют улучшить качество распознавания слитков. Мы также предлагаем возможность ручной корректировки результатов распознавания, что позволяет повысить надежность системы. Важно учитывать, что для эффективной работы системы машинного зрения необходимо обеспечить хорошее освещение и четкость изображения. В противном случае, результаты распознавания могут быть неточными.
Обслуживание и ремонт
Беспутевой ковочный манипулятор – это сложное оборудование, которое требует регулярного обслуживания и ремонта. Важно проводить профилактические осмотры, замену изношенных деталей и калибровку систем управления. Неправильное обслуживание может привести к поломкам и снижению эффективности работы манипулятора. В ООО Цзянсу Лунъянь Машинери мы предлагаем услуги по обслуживанию и ремонту беспутевых ковочных манипуляторов любых марок и моделей. Наша команда специалистов имеет большой опыт работы с этим оборудованием и способна быстро и эффективно устранять любые неисправности. Мы также предлагаем услуги по поставке запасных частей и комплектующих.
В процессе эксплуатации, мы неоднократно сталкивались с проблемами, связанными с износом приводных ремней и муфт. Эти детали подвергаются высоким нагрузкам и могут выходить из строя довольно быстро. Регулярная замена приводных ремней и муфт позволяет предотвратить поломки и снизить риск простоев. Мы рекомендуем проводить профилактическую замену этих деталей каждые 6-12 месяцев, в зависимости от интенсивности использования манипулятора. Также, важно следить за состоянием под
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
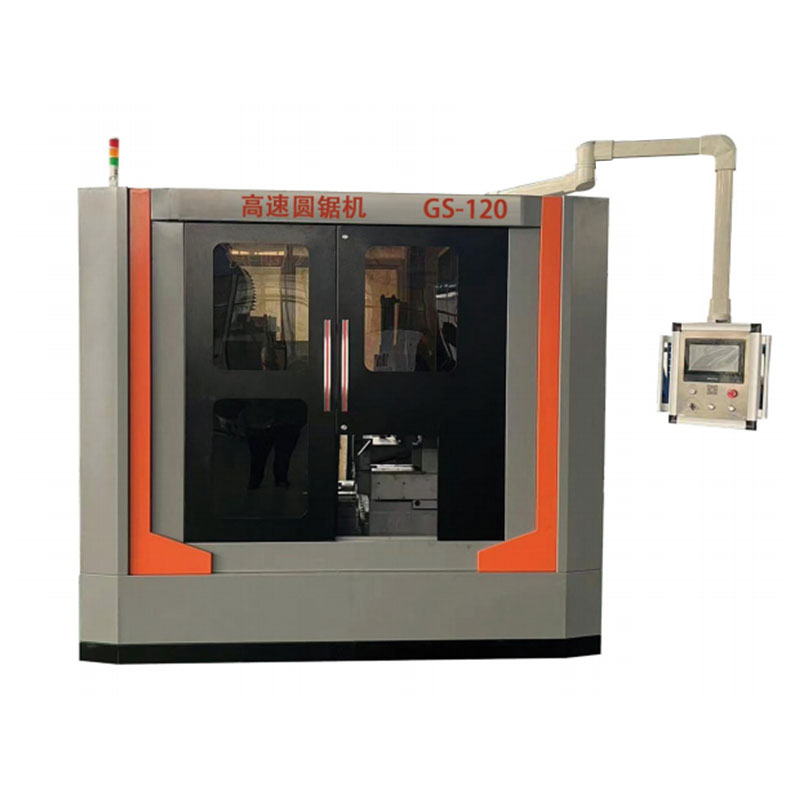 Высокоскоростная дисковая пила серии GS
Высокоскоростная дисковая пила серии GS -
 Пятиосевой тяжеловесный робот с ЧПУ
Пятиосевой тяжеловесный робот с ЧПУ -
 Двухколонный ковочный пресс
Двухколонный ковочный пресс -
 Горизонтальный радиально-осевой ЧПУ-раскатной кольцевой станок
Горизонтальный радиально-осевой ЧПУ-раскатной кольцевой станок -
 Камерная электропечь с выдвижным подом
Камерная электропечь с выдвижным подом -
 Загрузочно-разгрузочная машина для ковки
Загрузочно-разгрузочная машина для ковки -
 Вертикальный кольцерезный станок
Вертикальный кольцерезный станок -
 Станок для радиального расширения колец
Станок для радиального расширения колец -
 Автоматизированная линия для ковки ведущих, натяжных и ведомых колёс
Автоматизированная линия для ковки ведущих, натяжных и ведомых колёс -
 Автоматическая ковочная линия для фланцев с высоким воротником и кольцевых заготовок
Автоматическая ковочная линия для фланцев с высоким воротником и кольцевых заготовок -
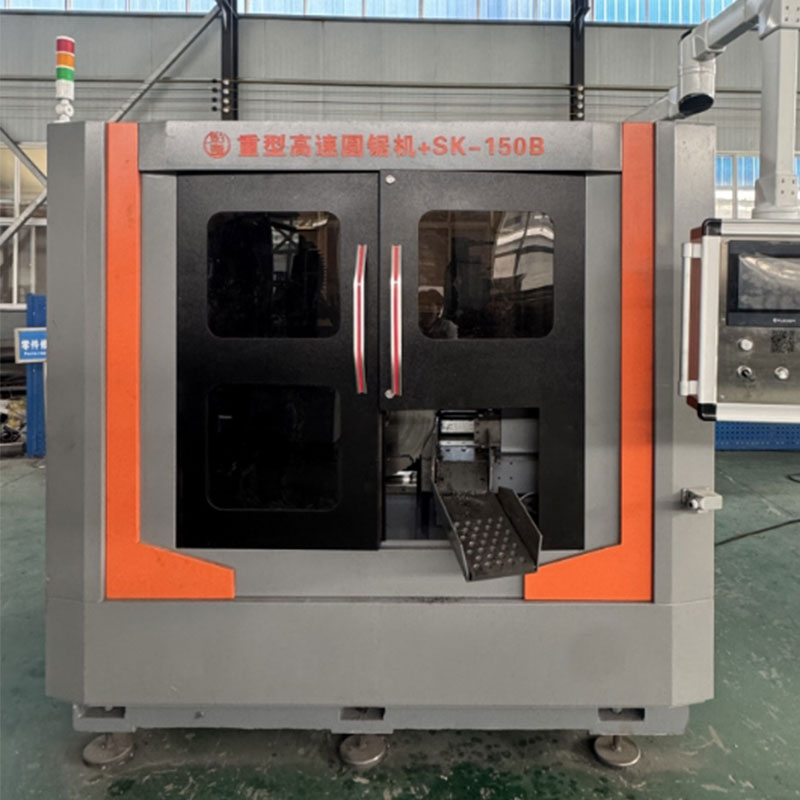 Металлорежущая дисковая пила серии SK
Металлорежущая дисковая пила серии SK -
 Сквозная печь средней частоты
Сквозная печь средней частоты
Связанный поиск
Связанный поиск- гусеничный ковочный загрузочно-разгрузочный манипулятор 30 т Производитель
- Китай ковочный пресс с автоматической пробивкой производители
- Самый лучший специальный пресс 630 т завод
- Самый лучший оборудование для ковки колес заводы
- Китай гидравлический пресс 2000 тонн заводы
- Китай одноручьевой высокоскоростной ковочный пресс 1200 т заводы
- Самый лучший ковочный пресс с автоматической пробивкой производители
- Прецизионная ковочная машина SX-85 завод
- Самый лучший кузнечное оборудование производитель
- Самый лучший оборудование для развальцовки заводы

